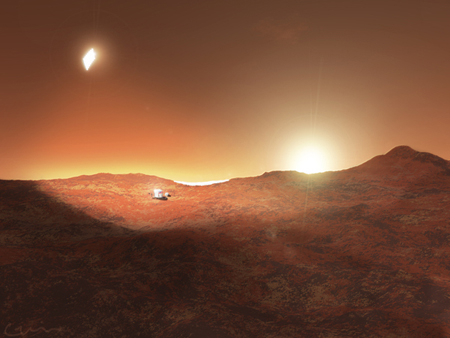
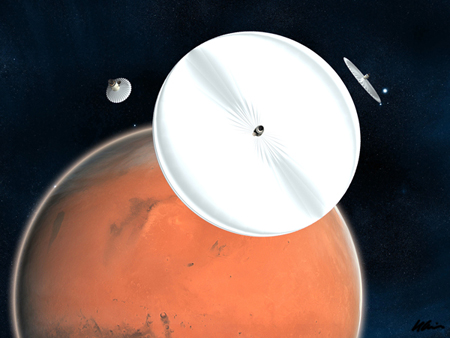
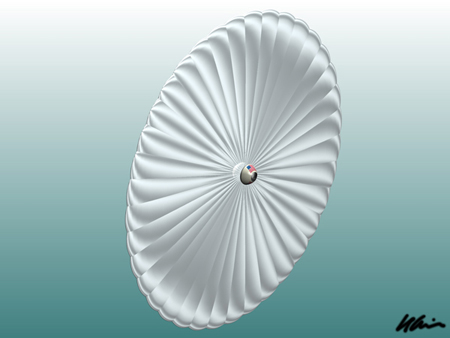
- Reflector Array as seen from Mars orbit.
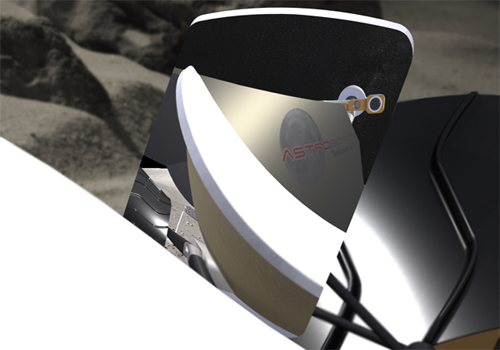
- Array and illuminated area from the Martian surface.
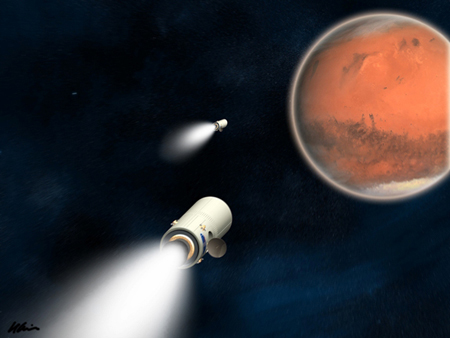
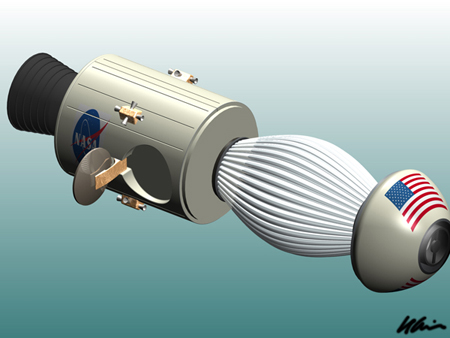
- Reflector vehicles en route to Mars.
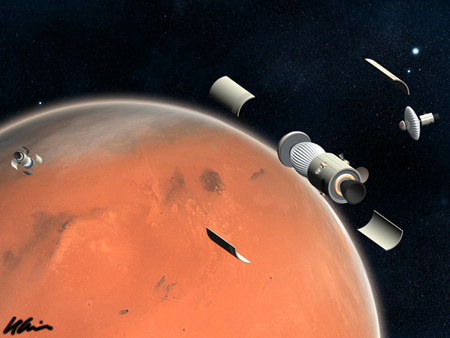
- Vehicles beginning to deploy.
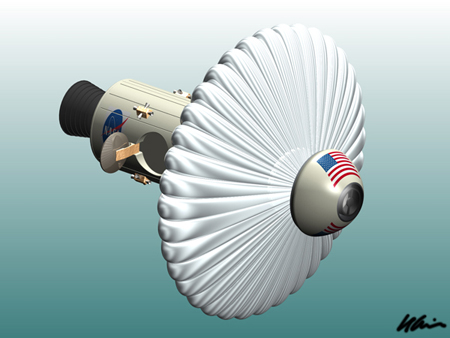
- Vehicles in various stages of deployment.
Click the numbers below the slide show to advance the images.












.jpg)

.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)

.jpg)
.jpg)
.jpg)
.jpg)

.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.png)
